The ocean, covering over 70% of our planet, remains humanity's final frontier. Its crushing depths, icy cold, and perpetual darkness have long made exploration perilous and limited. Yet, the tide has turned, not with sails, but with advanced robotics. Enter the remarkable world of Types of Underwater Robots, engineering marvels designed to conquer the abyss where humans cannot survive. These aren't monolithic machines; they represent a diverse ecosystem of specialized platforms, each meticulously crafted for specific missions ranging from scientific discovery and industrial inspection to military defense and deep-sea mining. Forget simple categorization – we're diving into the intricate taxonomy of these subsea workhorses and unveiling how their unique capabilities are unlocking the ocean's most profound secrets and resources. Understanding the fundamental distinctions is crucial. The two most prominent Types of Underwater Robots are Remotely Operated Vehicles (ROVs) and Autonomous Underwater Vehicles (AUVs), each with distinct operational philosophies. ROVs are physically tethered to a surface vessel via an umbilical cable. This critical lifeline provides immense power and enables real-time, high-bandwidth communication. An operator stationed on the ship controls every movement of the ROV using a sophisticated console, viewing the environment through high-definition cameras mounted on the vehicle. This constant human-in-the-loop control makes ROVs exceptionally versatile for complex tasks requiring dexterity, immediate intervention, and detailed observation. Key Strengths: Real-time piloting, powerful manipulation (arms, cutters, etc.), heavy-duty thrusters for station-keeping in currents, live video/data transmission, ability to deploy heavy payloads. Common Missions: Deep-water construction (oil & gas), subsea infrastructure inspection and maintenance, wreck exploration/recovery, scientific sampling requiring manipulators, intervention tasks (e.g., valve turning). Examples: Work-class ROVs like those from Oceaneering or Schilling Robotics are used extensively in offshore industries. Smaller, more agile observation-class ROVs are popular in scientific research and archaeology. In stark contrast, AUVs operate independently. Pre-programmed before launch, they execute their mission without constant human control or a physical tether. They carry their own power source (batteries) and navigate using sophisticated onboard systems like inertial navigation (INS), Doppler Velocity Logs (DVL), sonar, and GPS (when surfacing). While primarily sensor platforms, some are gaining simple manipulator capabilities. Key Strengths: Independence from surface vessels, ability to cover vast survey areas efficiently, quieter operation (better for biological studies), operation in hazardous environments (ice-covered seas, under hulls), consistent data collection. Common Missions: Large-scale seabed mapping (bathymetry), pipeline/cable route surveys, environmental monitoring, mine countermeasures (MCM), oceanographic data collection (salinity, temperature, chemistry), search operations. Examples: The Hugin series (Kongsberg Maritime), the REMUS series (HII), and the Slocum glider (Teledyne Webb Research). Understanding these core Types of Underwater Robots is vital, but the landscape is far richer... The diversity of subsea challenges demands specialized solutions beyond the ROV-AUV dichotomy. Here are other critical Types of Underwater Robots pushing boundaries. Gliders are a unique, buoyancy-driven type of AUV. Instead of conventional propellers, they move by changing their buoyancy and using wings to generate forward motion as they glide up and down through the water column. This method is incredibly energy-efficient, enabling missions lasting months and covering thousands of kilometers. Key Strengths: Unprecedented endurance (months), vast spatial coverage, operational in all weather (as they are subsurface), minimal surface support needed for data bursts via satellite. Common Missions: Large-scale oceanographic monitoring (temperature, salinity gradients, oxygen), climate research, detection of ocean phenomena (upwelling, eddies), long-term environmental baseline studies. Examples: Slocum Gliders, Seagliders, Spray Gliders. HROVs are a fascinating evolution designed to offer the "best of both worlds." The most famous example is the Woods Hole Oceanographic Institution's Nereus (sadly lost, but the concept lives on). HROVs can operate in tethered ROV mode for close-up inspection and manipulation when near the surface ship. Crucially, they can also disconnect their tether to become a free-swimming AUV, allowing them to roam autonomously to pre-programmed locations before reconnecting. Key Strengths: Combines ROV precision with AUV independence/extended range, ideal for exploring remote trenches or areas where surface support is logistically challenging. Common Missions: Deep-sea exploration in extreme depths (like the hadal zone), operations in remote locations requiring both autonomy and intervention capabilities. While not robots in the strictest sense, HOVs like the famous ALVIN or the Deepsea Challenger play a vital adjacent role. They carry scientists and pilots directly to the deep sea inside a reinforced pressure hull. Their interaction capability and unparalleled situational awareness for the onboard humans complement robotic exploration. They often work alongside ROVs. Key Strengths: Direct human observation and immediate decision-making at depth, psychological impact on scientific investigation. Common Missions: Complex geological/biological surveys requiring expert judgment on-site, deep-sea ecosystem study, disaster investigation (e.g., RMS Titanic, Titan submersible). Moving beyond free-swimming vehicles, crawlers are robots designed to traverse the seafloor on tracks or legs. Often connected to the surface via long cables or stationed at permanent observatories, they can carry heavy payloads of sensors and manipulate instruments precisely in one location for extended periods. Key Strengths: Exceptional stability on rough terrain, ability to conduct long-term, fixed-point monitoring or experiments, handling heavy instruments. Common Missions: Long-term ecological monitoring at specific sites (e.g., deep-sea vents, methane seeps), mining exploration and sampling, deep-sea observatory sensor maintenance. Examples: The Mobile Underwater Robot (MUR) developed for the Ocean Networks Canada observatory. Inspired by nature and driven by advances in miniaturization and swarm robotics, this emerging class includes very small AUVs designed to work cooperatively. Individual units might be simple, but their collective intelligence allows them to cover large areas quickly, adapt to currents, and gather diverse datasets simultaneously. Bio-inspired designs mimicking fish or jellyfish propulsion are particularly active research areas. Key Strengths: Scalability, redundancy, potentially low cost per unit, ability to access confined spaces, cooperative sensing and mapping. Common Missions (Emerging): Environmental monitoring in sensitive/cramped ecosystems (coral reefs, under ice), military ISR (Intelligence, Surveillance, Reconnaissance), search in cluttered environments, fundamental studies of collective behavior. Selecting the appropriate robot isn't arbitrary; it's a strategic decision driven by mission parameters. Key factors include: Depth Rating: The target depth dictates pressure-hull requirements. Payload Requirements: What sensors, manipulators, or tools must the robot carry? Required Range and Endurance: Short inspection vs. transoceanic survey? Level of Autonomy vs. Control: Does the task need real-time human intervention? Data Transfer Needs: Is live HD video essential, or can data be downloaded later? Operating Environment: Strong currents? Ice cover? Confined spaces? Cost and Logistics: Availability of support vessels, deployment complexity, operational costs. R&D is constantly pushing the capabilities of all these Types of Underwater Robots. Advances in AI are enabling greater autonomy in complex decision-making (e.g., obstacle avoidance, adaptive mission planning). Battery technology and energy harvesting (like wave-powered gliders) are extending endurance. New materials allow lighter, stronger structures. Simultaneously, the convergence of robotics with disciplines like oceanography, geology, and biology is yielding new sensor packages and application-specific designs. While often physically invisible, Artificial Intelligence (AI) is becoming the cornerstone of increasingly sophisticated Types of Underwater Robots, particularly AUVs and emerging platforms: Smarter Navigation: AI algorithms enhance navigation robustness, especially in challenging environments without GPS, using sensor fusion (INS, DVL, sonar) and Simultaneous Localization and Mapping (SLAM). Advanced Perception: Machine Learning (ML), particularly deep learning, allows robots to interpret sonar data, identify objects (wrecks, mines, species), classify seafloor types, and detect anomalies automatically. Adaptive Mission Planning: AI enables robots to sense their environment and adjust their mission parameters or paths in real-time, responding to unforeseen currents, obstacles, or interesting discoveries flagged by perception systems. Swarm Intelligence: AI governs coordination, communication, and task allocation within swarms of micro-robots for efficient exploration. Predictive Maintenance: AI analyzes operational data from onboard sensors to predict component failures before they happen, increasing reliability during long missions. The trajectory points towards increased intelligence, deeper access, enhanced cooperation, and broader commercialization: Ubiquitous AI: AI/ML capabilities will become standard across almost all classes, increasing autonomy and task complexity. Hadal Exploration Boom: Hybrid designs and specialized AUVs will push exploration towards the ocean's deepest trenches (over 6,000m) – Earth's least-explored realms. Persistent Presence: Energy harvesting solutions (fuel cells, ocean thermal, wave) and advanced batteries will enable truly long-duration underwater stations and patrols. Maritime Domain Awareness: Autonomous networks of underwater sensors and mobile robots will form persistent surveillance and monitoring grids for defense, security, and environmental protection. Rise of Biomimetics: Bio-inspired designs will become more prominent, offering efficient propulsion and unique capabilities (e.g., soft robotics for delicate manipulation). Autonomous Underwater "Things": Integration into larger autonomous maritime and logistical systems, coordinating with surface drones and ships. Commercialization Acceleration: Beyond oil/gas (which remains key), growth is exploding in offshore wind farm inspection/maintenance, aquaculture monitoring, environmental consulting, marine research support, and potentially deep-sea mining. Q: What's the main difference between an ROV and an AUV? A: The fundamental difference is tethering and control. ROVs (Remotely Operated Vehicles) are connected to a surface vessel by a cable for power and real-time human control. AUVs (Autonomous Underwater Vehicles) operate independently, pre-programmed, carrying their own power, and navigating on their own for extended periods without direct real-time intervention. Q: How deep can underwater robots go? A: Depth capability varies dramatically by design and purpose. Work-class ROVs commonly operate down to 3,000-4,500 meters. Specialized AUVs and deep-sea HOVs are designed for full ocean depth (11,000 meters), such as the now-lost hybrid HROV Nereus or the DSV Limiting Factor. Gliders typically operate shallower, up to 1,000-2,000 meters. Q: How long can underwater robots stay down? A: Endurance is another key differentiator. ROVs are limited by umbilical length/surface support, typically operating for hours to a day or so continuously. AUVs last from hours to days on battery power. Gliders, due to their energy-efficient buoyancy-driven motion, are the endurance champions, capable of missions lasting several months, traversing thousands of kilometers. Q: Are underwater robots used for anything besides research? A: Absolutely! While vital for research, they are crucial industrial tools. Key uses include inspecting and maintaining offshore oil/gas platforms, pipelines, and wind farms; laying and inspecting subsea cables; performing hull inspections on ships and submarines; military applications like mine countermeasures and surveillance; supporting aquaculture operations; and enabling underwater archaeology. Q: How is AI changing underwater robotics? A: AI is revolutionizing underwater robotics, particularly autonomy. Key applications are significantly enhancing navigation precision and robustness using advanced sensor fusion; enabling automated analysis of sensor data (sonar, camera) for real-time object detection, classification, and anomaly finding; allowing adaptive mission planning for on-the-fly decision making based on encountered conditions; and facilitating complex coordination within swarms of smaller robots.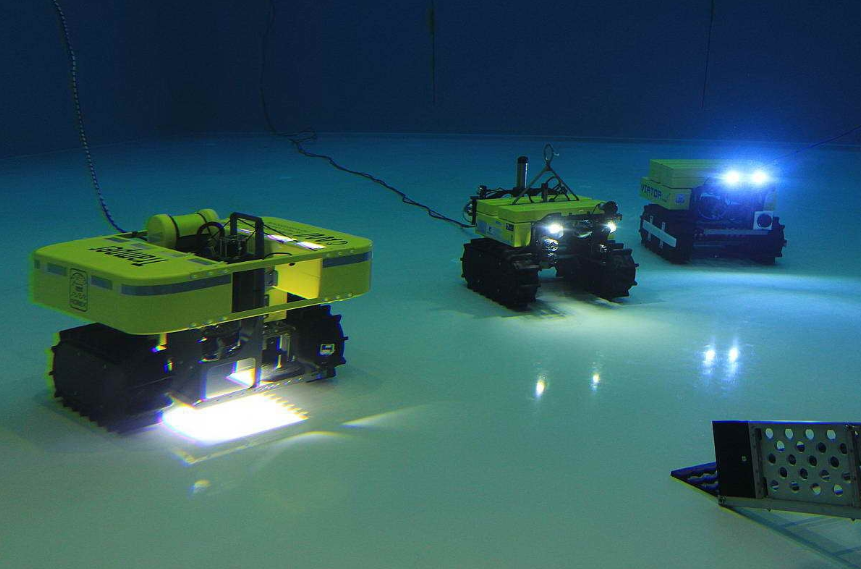
The Foundational Types of Underwater Robots: ROVs and AUVs
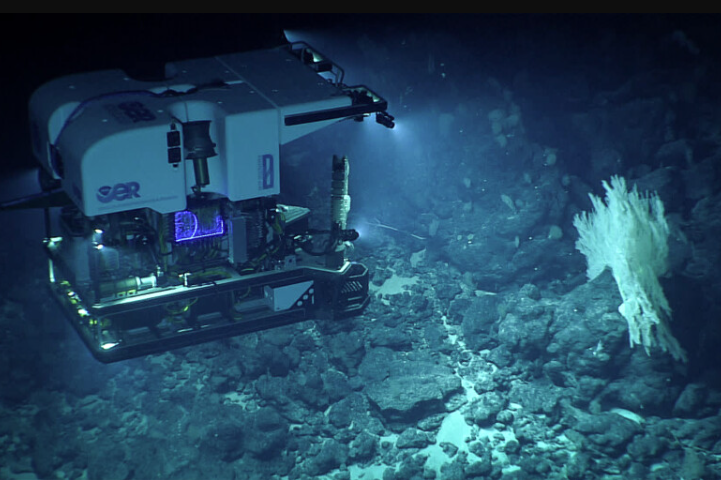
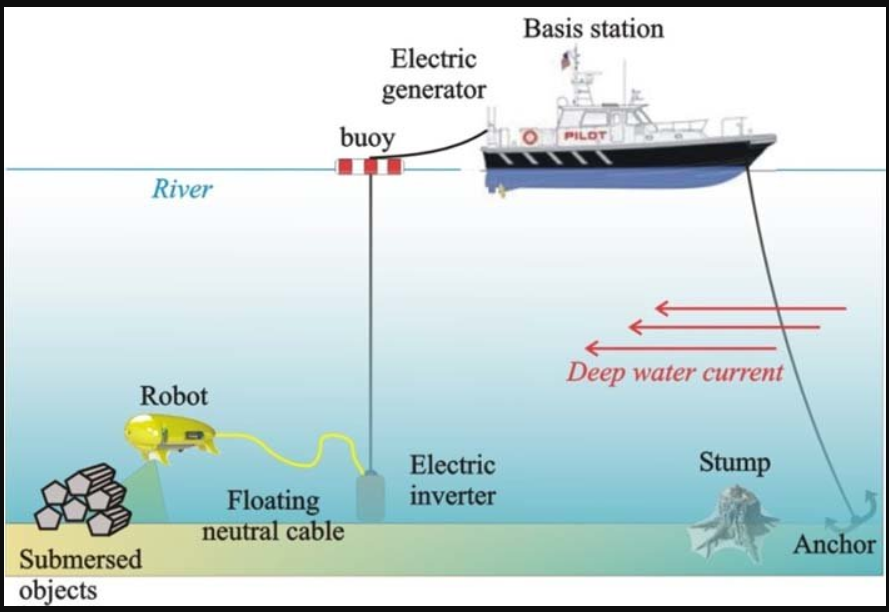
1. Remotely Operated Vehicles (ROVs): The Human Pilot's Eyes and Hands Below
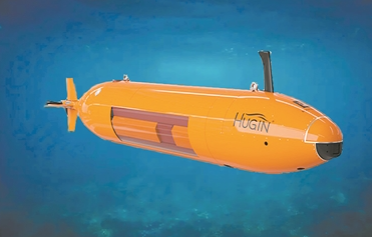
2. Autonomous Underwater Vehicles (AUVs): The Robotic Oceanographers
Specialized and Emerging Types of Underwater Robots
3. Underwater Gliders (A Subset of AUVs): Masters of Endurance
4. Hybrid Remotely Operated Vehicles (HROVs): Blurring the Lines
5. Human-Occupied Vehicles (HOVs): The Manned Submersibles
6. Crawler Underwater Robots: The Seafloor Residents
7. Micro and Swarm Underwater Robots: The Future is Tiny (and Numerous)
Choosing the Right Tool: How Types of Underwater Robots Match Mission Needs
The Unseen AI: Powering Modern Underwater Robotics
The Future Depths: Where Types of Underwater Robots are Headed
Frequently Asked Questions (FAQs)