Imagine a robotic companion as agile on land as its biological namesake, but engineered to plunge fearlessly into the crushing depths and murky darkness of the ocean floor. That's the essence of a Marine Robot Dog. More than just a niche gadget, these amphibious robots represent a fascinating convergence of terrestrial robotics and maritime technology, poised to revolutionize how we explore, monitor, and interact with the planet's most inaccessible environment. Forget land-bound inspection jobs – the real frontier lies beneath the waves, and the Marine Robot Dog is charging headfirst into it. What powers its unique amphibious capabilities, what incredible tasks can it perform where humans dare not venture, and why is it becoming an indispensable tool across industries from offshore energy to marine conservation? Let’s dive deep and uncover the future of aquatic robotics.
Beyond Spot: Understanding the Marine Robot Dog Concept
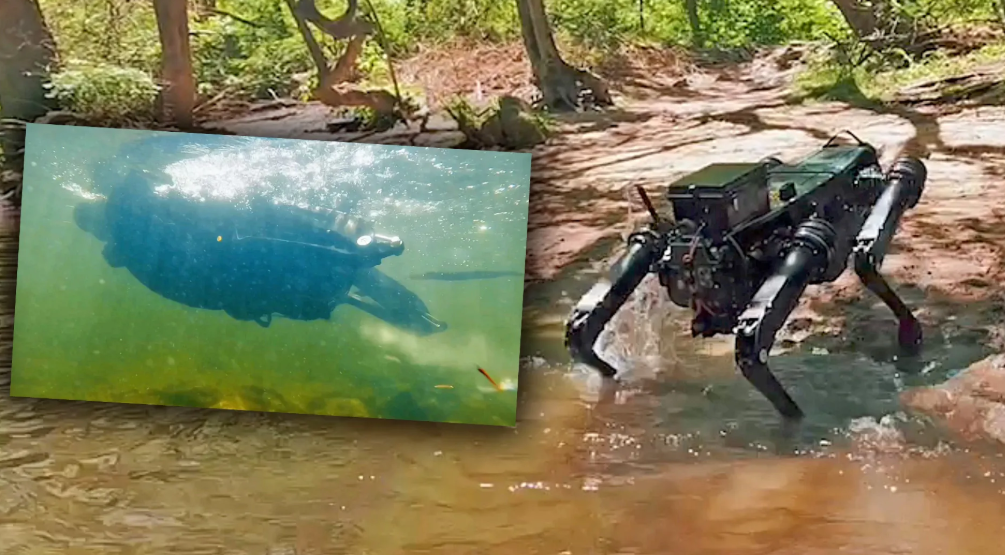
Most people are familiar with quadrupedal robots like Boston Dynamics' Spot, designed primarily for land-based mobility across rough terrain. A Marine Robot Dog, however, takes this foundation and supercharges it for aquatic operations. The core concept is creating a versatile, amphibious platform capable of seamless transitions between terrestrial and marine environments. Unlike remotely operated vehicles (ROVs) confined to underwater operation via tethers, or autonomous underwater vehicles (AUVs) that operate underwater but cannot walk on land, the Marine Robot Dog bridges the gap. Its unique value proposition lies in eliminating the need for separate robots (and complex deployment/recovery systems) for tasks that span the shore, splash zone, and subsea domain.
What truly defines a robot as a Marine Robot Dog? While designs vary, key characteristics include:
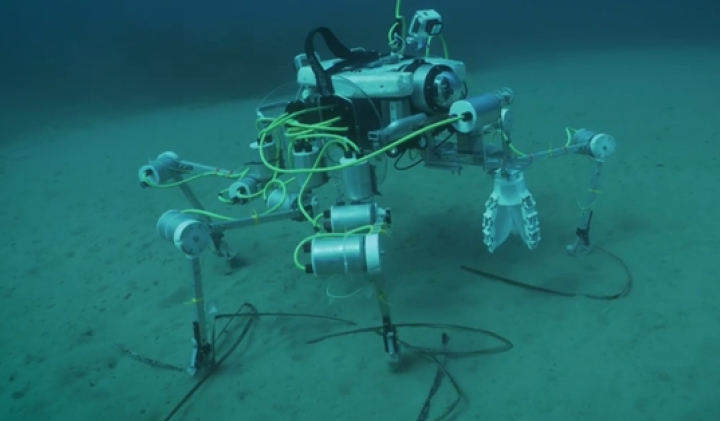
Quadrupedal Locomotion: Four-legged design providing stability and mobility on uneven terrain (sand, rocks, deck plating).
Amphibious Capability: Engineered seals and waterproofing allowing operation both submerged and on land/structures.
Pressure Tolerance: Structural reinforcement to withstand significant hydrostatic pressure at depth.
Underwater Propulsion: Integrated thrusters (typically ducted for protection) for controlled movement beneath the surface, distinct from its walking gait.
Sensory Adaptation: Sensors designed or protected for functionality in murky or dark water environments (e.g., acoustic sensors, specialized cameras).
Not Just a Modified Spot: Unique Engineering Challenges
Transforming a land-based robot dog into a true Marine Robot Dog is far from a simple waterproofing job. It involves overcoming formidable engineering hurdles. Water is nearly 800 times denser than air, demanding completely different propulsion physics. Seawater is highly corrosive, necessitating specialized materials like marine-grade aluminum alloys, titanium, or advanced polymers. Waterproofing dynamic joints against high pressure without hindering mobility requires intricate sealing solutions. Communication signals degrade rapidly underwater, forcing reliance on tethers (limiting range) or sophisticated acoustic modems (slower bandwidth). Power demands soar when powering thrusters, leading to careful energy management and battery design. These intense challenges highlight why true amphibious robots are a significant technological leap – and why the Marine Robot Dog is more than just a land bot taking a swim. Understanding the core engineering behind Marine Robots helps appreciate these feats – learn more in our deep dive Unraveling What Marine Robot Is & Why It Matter.
The Awesome Capabilities of the Marine Robot Dog
So, what magic can this robot perform? The Marine Robot Dog is emerging as a multi-role workhorse in challenging environments:
Subsea Inspection & Asset Integrity
This is perhaps its most impactful role. Equipped with high-definition cameras, zoom lenses, laser scanners, ultrasonic thickness gauges, and cathodic protection probes mounted on its chassis or a manipulator arm, the Marine Robot Dog can conduct detailed inspections of underwater infrastructure autonomously or via remote control. Think pipelines, oil rig support structures, subsea wellheads, bridge pilings, aquaculture cages, and port facilities. It can walk along pipelines or seafloors, navigate complex structures, and get into tight spaces impossible for divers or large ROVs. Its ability to walk onto deployment vessels significantly streamlines operations compared to crane-launched ROVs.
Search and Recovery Operations
Combining walking mobility on shorelines, jetties, and debris fields with underwater search capability makes the Marine Robot Dog a potent tool for maritime search and recovery (SAR). Sonar and sophisticated imaging can locate objects or individuals underwater, while manipulator arms could potentially aid in recovery. Its operational endurance often surpasses human divers.
Environmental Monitoring & Marine Research
Scientists are deploying Marine Robot Dogs for non-invasive monitoring of sensitive ecosystems like coral reefs, seagrass beds, and intertidal zones. They can collect water samples via integrated pumps, deploy sensors, film wildlife without intrusive vessels, and map habitats. Their ability to traverse the harsh, rocky shorelines bordering these environments, walk into the water, and commence subsea transects is invaluable.
Harbor Security & Anti-Submarine Warfare Support
The amphibious nature of the Marine Robot Dog makes it ideal for patrolling docks, seawalls, and shallow harbor waters for security threats (like mines or intruders). Its underwater cameras and sonar can inspect vessel hulls (countering limpet mines). While not primary combat platforms, their surveillance and detection capabilities provide critical support in maritime security. Some prototype systems explore weaponization concepts, but this remains ethically complex.
Offshore Energy & Aquaculture Maintenance
Beyond inspection, the Marine Robot Dog holds potential for light intervention tasks. Imagine routine valve operations, cleaning biofouling from aquaculture nets using specialized tools on manipulator arms, or visually confirming remote operations on subsea equipment. This reduces the need for expensive work-class ROVs or saturation dives for simple tasks. This capability aligns perfectly with innovative solutions offered by leading Marine Robotics Companies Commanding the Depths.
Pushing Boundaries: The Cutting Edge of Marine Robot Dog Research
The capabilities described are impressive, but research labs globally are pushing the Marine Robot Dog concept even further:
Enhanced Manipulation: Developing more dexterous underwater manipulators capable of complex tool use and delicate object handling in currents.
Bio-Inspired Locomotion: Studying crabs, lobsters, and sea turtles to design legs and gaits optimized for moving across sandy bottoms, rocks, and soft sediments more efficiently than conventional thrusters alone.
"Smart Skin" Sensing: Integrating pressure and flow sensors directly onto the robot's limbs to provide better hydrodynamic awareness and navigation feedback.
Multi-Robot Cooperation: Exploring swarms of smaller Marine Robot Dogs coordinating for large-scale seabed mapping or complex search patterns.
Advanced AI Integration: Incorporating real-time machine learning for vision-based navigation (avoiding obstacles autonomously), predictive maintenance alerts for the robots themselves, and intelligent decision-making during missions.
Deploying a Marine Robot Dog: Step-by-Step Guide
While specifics vary by model, here's a generalized overview of deploying and operating an amphibious Marine Robot Dog:
Mission Planning & Preparation:
Define objectives (inspection route, target area search, sample collection points).
Gather environmental data (tides, currents, water visibility).
Plan deployment/recovery sites considering accessibility and safety.
Perform pre-dive checks: Verify seals, battery levels, pressure sensor calibration, thruster functionality, tether integrity (if used), and sensor operation (cameras, lights, sonar).
Load mission software waypoints or autonomous instructions.
Deployment:
Position robot at the deployment site (beach, dock, deck).
Power on systems, initiate communication link (tethered cable or wireless surface link before submersion).
Drive/walk the robot from land/structure directly into the water, transitioning to thruster control as buoyancy increases.
Subsea Operation:
Operate via remote control (joystick interface for movement, manipulator, camera) using video feeds.
OR, activate autonomous mode for pre-programmed tasks, monitoring status and sensor data.
Monitor depth, pressure, battery life, and communication signal strength continuously.
Recovery:
Guide the robot (manual or autonomous) back to the designated recovery point.
Drive/walk the robot out of the water onto land/deck.
Power down systems safely.
Post-Mission Procedures:
Thoroughly rinse the robot with fresh water to remove salt and debris.
Download mission logs, sensor data, and media.
Perform detailed inspection and preventive maintenance per manufacturer guidelines.
Recharge batteries.
Review data and prepare reports.
Safety Considerations
Operating any robotic system in marine environments demands strict safety protocols. Key considerations include maintaining safe distances from operational propellers/manipulators, using surface marker buoys during operations, adhering to maritime rules, ensuring robust emergency recovery procedures (e.g., buoyancy aids or tethers with lift lines), and clear communication protocols with any nearby vessels or personnel.
Challenges & Considerations: Is a Marine Robot Dog Right For You?
Despite their promise, adopting Marine Robot Dog technology involves significant considerations:
Technical Limitations
Current models face physical limits. Operational depth ratings typically max out around 300-500 meters, far less than specialized deep-sea ROVs. Battery life for submerged operation with thrusters is often limited to 2-6 hours. Underwater dexterity and payload capacity (for tools/sensors) are still evolving. Robust perception and navigation in murky water or strong currents remain challenging.
Cost Factor
Developmental and niche technology comes at a premium. Acquiring a sophisticated Marine Robot Dog can run into hundreds of thousands of dollars, plus significant operational costs (specialized operators, maintenance, deployment vessels, insurance). This price point limits current adoption primarily to large industries (oil & gas, defense) and well-funded research institutions.
Ethical & Ecological Questions
Potential applications like weaponization raise serious ethical dilemmas. Increased deployment density could cause localized noise pollution impacting marine life. Regulatory frameworks for autonomous devices in national and international waters are still catching up. Operators bear significant responsibility for mitigating ecological disturbance and adhering to wildlife protection laws.
The Operator Skills Gap
Maximizing the potential of these complex systems requires highly skilled operators proficient in robotics, subsea operations, navigation, and specific mission software. Finding and training such talent is an ongoing challenge for the industry.
FAQs: Your Marine Robot Dog Questions Answered
High-intensity LED lights for close-range visual camera work.
Low-light or turbidity-compensated cameras.
Acoustic cameras (e.g., DIDSON, BlueView) creating sonar images.
Forward-Looking Sonar (FLS) for obstacle avoidance and navigation at longer ranges.
Scanning sonars for creating detailed maps of structures or the seafloor.
Laser scanners for very high-resolution 3D mapping of surfaces.
The Future is Amphibious
The Marine Robot Dog isn't science fiction; it's a rapidly maturing tool with tangible applications unlocking the complex boundary between land and sea. While cost, depth limitations, and technical hurdles remain, the trajectory is clear. Advancements in AI, materials science, battery technology, and underwater communication will inevitably push these amphibious robots deeper, make them smarter, more capable, and more accessible. As this happens, we can expect to see Marine Robot Dogs playing increasingly vital roles in safeguarding critical underwater infrastructure, advancing oceanographic research, protecting marine environments, and ensuring security in coastal zones. The age of amphibious robotic exploration is just beginning, and the Marine Robot Dog is leading the charge – a technological marvel blurring the line between terra firma and the abyss.